IRB120机器人教学实验平台由ABB机器人本体、上位机、多功能实验台以及控制系统四部分组成。平台采用模块化结构设计,具备上位机远程遥操作机器人搬运、码垛等功能,是一款典型的柔性化教学平台。机器人可连接上位机对机器人控制器进行编程,同时配合手控器实现遥操作系统地面验证的功能。
系统有单机、联动两种工作方式。单机模式:实验系统各子单元可通过手动控制进行调节,机器人可通过示教器进行运动。联动模式:各子单元可同时工作。学生可通过上位机编程,使机器人对工件依次进行吸附、转移、码垛等工作步骤。
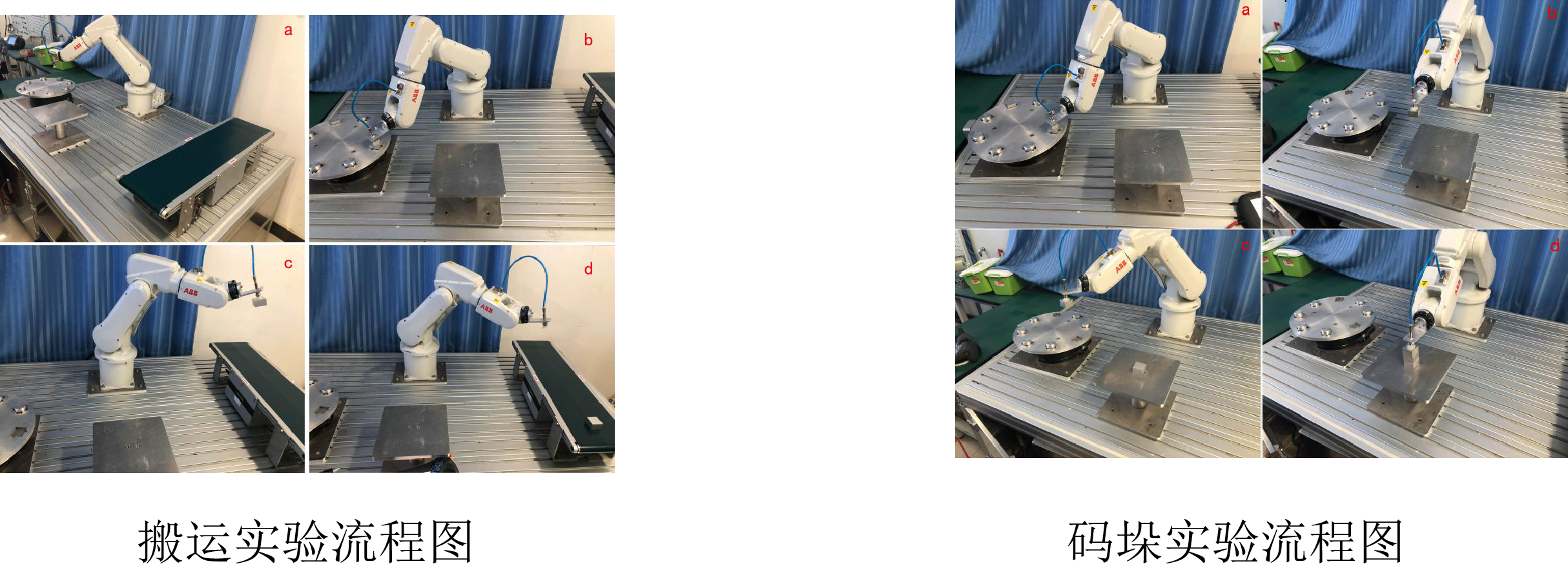
教研室目前可供学生编程练习及实际上手操作的典型教学实验有:1)搬运实验,2)码垛实验。